MATISSE: Agent-Based Intelligent Traffic Simulation System
Overview
MATISSE (Multi-Agent based TraffIc Safety Simulation systEm) is a large-scale multi-agent based simulation platform designed to specify and execute simulation models for Agent-based Intelligent Transportation Systems. It allows the simulation of a variety of traffic scenarios (e.g., safety improvement, congestion reduction, urban evacuation).
MATISSE‘s environment is acan model a variety of complex traffic network. Agent instances include autonomous and non-autonomous vehicles (drivers), conventional and smart intersection controllers and pedestrians.
The unique characteristics of MATISSE are:
- It offers a complete set of traffic elements essential for the modeling of ITS (e.g., virtual drivers, virtual intersection controllers).
- Each agent type has the capability to dynamically “sense” its surroundings through simulated sensors while communicating and/or collaborating with other agents.
- It provides integrated capabilities within the simulation system that allow run-time user interactions for: a) modifying properties of simulated traffic elements (e.g., changing vehicle acceleration), b) modifying properties of the traffic environment (e.g., changing lane directions), c) triggering external events (e.g., emergency siren).
- It provides the capability to change the traffic network topology at run-time to simulate various emergency scenarios such as road damages and contraflow operations.
- It provides the capability to dynamically introduce accidents in the traffic environment.
MATISSE
MATISSE’s Architecture
At a high level, Matisse contains several subsystems. Its main constituent is the Simulation Module which consists of three subsystems.
The Agent System creates and manages simulated traffic agents. Due to the complexity of the simulated agents and to enhance future extensibility, agent types are implemented as three separate platforms: 1) the Vehicle Platform creates and manages Context Aware Intelligent (CAI) Vehicle agents; 2) the Intersection Control Agent Platform creates and manages intersection controller agents; and 3) the Zone Manager Platform creates and manages service and traffic manager agents. Communications between simulated agents within and across platforms take place over the Agent-Agent Message Transport Service.
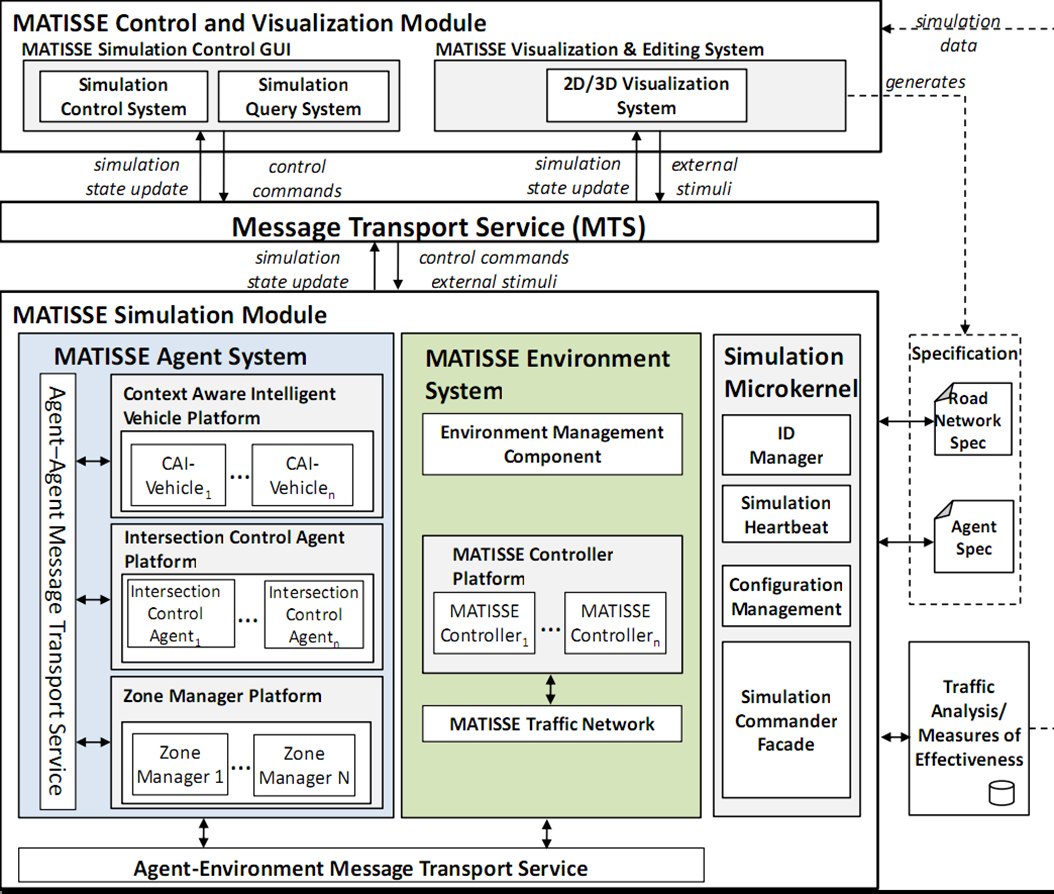
The Environment System creates and manages the traffic environment; i.e., complex traffic network, in which simulated agents are situated. Also, it stores and maintains a detailed specification of the traffic network topology. Communications between the Agent System and Environment System take place over the Agent-Environment Message Transport Service.
The Simulation Microkernel manages the simulation work-flow.
The Control and Visualization Module receives traffic simulation information through the MTS. It renders 2D and 3D representations of the simulation and provides mechanisms for the user to interact with the simulation and modify parameters at run-time.
Traffic Network Structure
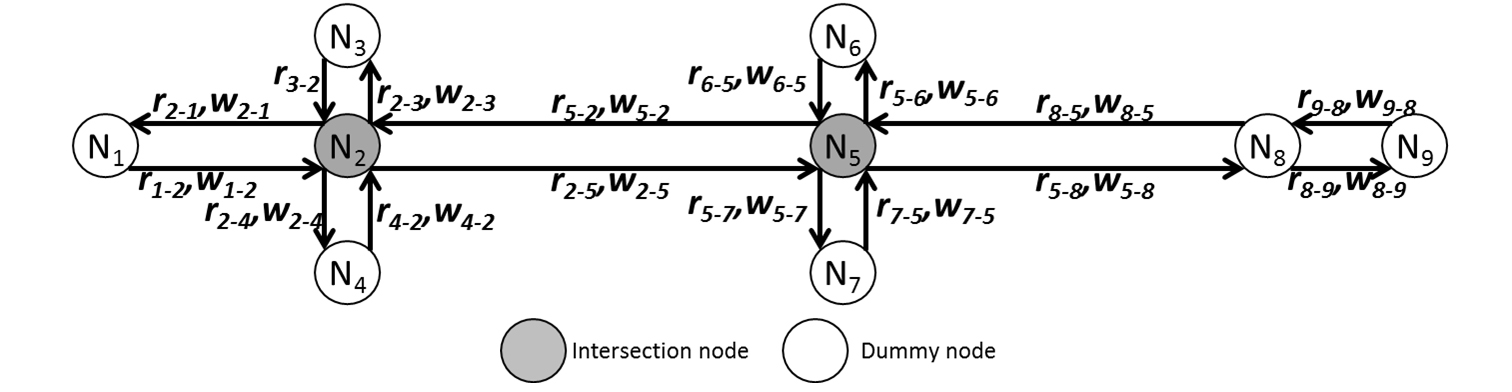
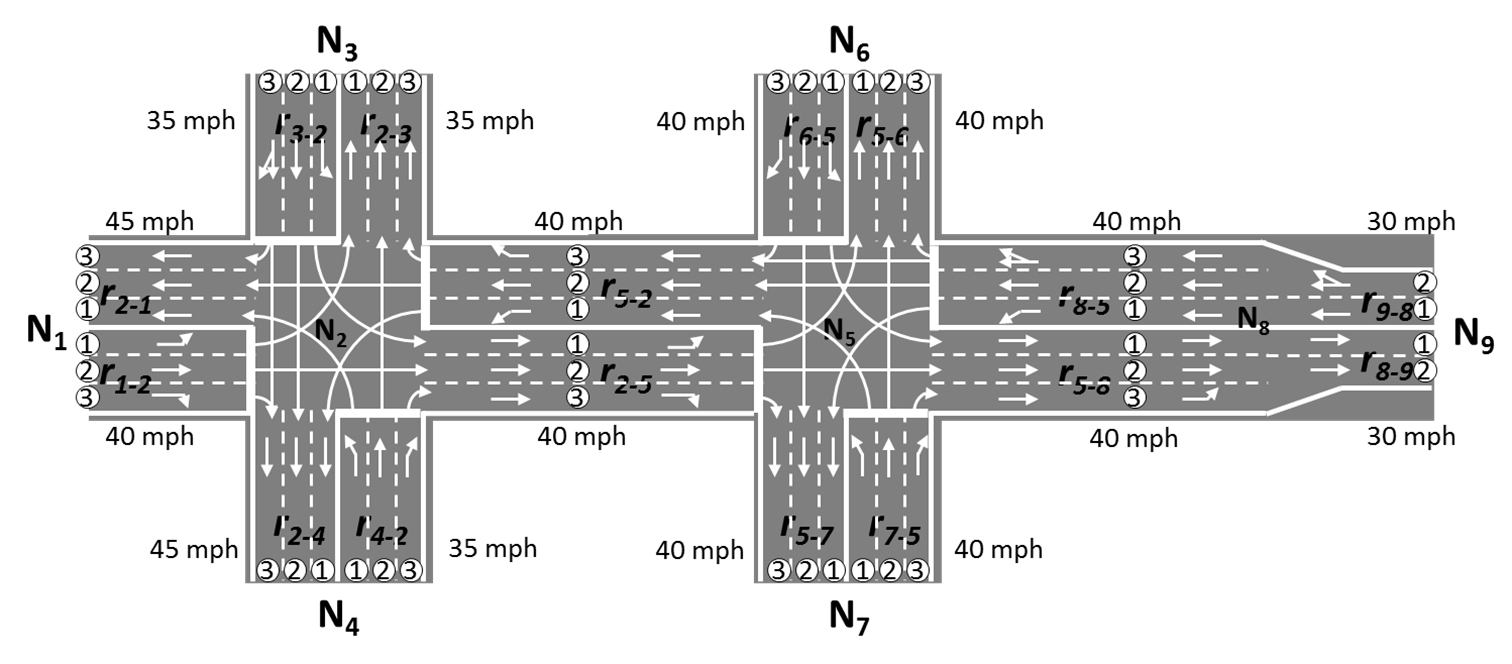
In MATISSE, a traffic network is represented as a directed graph. Directed edges in the graph represent road segments, and nodes represent intersections or connections between consecutive road segments. A lane connection specifies how lanes in the upstream road are connected to lanes downstream. In other words, it defines the possible traffic movement between lanes in two consecutive roads.
Figure (a) shows an example of a directed graph that represents a traffic network. In the illustrated example, node N2 is an intersection node, while other nodes are connection nodes used to connect road segments. Figure (b) illustrates the traffic network after specifying detailed road attributes.
Vehicle Agents
In MATISSE, a vehicle agent can be set to simulate:
- A regular vehicle driven by a driver.
- A smart, unconnected vehicle driven by a driver.
- A smart, connected vehicle driven by a driver.
- An autonomous, unconnected vehicle.
- An autonomous connected vehicle.
The decision making process for a vehicle agent considers vehicle dynamics and travel route planning. Vehicle dynamics is related to the vehicle agent’s tactical decisions about speed and lane change that need to be applied during a simulation cycle. Travel route planning refers to the long-term planning related to the selection of a real-time travel route.
MATISSE 3.0 offers algorithms and their implementations for both vehicle dynamics and travel route planning.
Vehicle Driver
A simulated driver perceives its environment through vision and auditory sensors. The vision sensor allows the simulated driver to “see” the portion of the environment located within the driver’s vision scope. This perception is taken into account in the decision-making process. For example, if a driver sees a leading vehicle decelerate, s/he may decide to decelerate in order to avoid collision. On the other hand, the auditory sensor allows the simulated driver to hear audible events (e.g., sirens) that propagate to the driver’s auditory perception range.
A simulated driver is assigned one of five levels of distraction: level 1: sober; level 5: impaired. The higher the level of distraction, the less the driver is able to perceive its surroundings.

A driver’s level of distraction can be modified at run-time.
Movement Dynamics
Microscopic simulation systems account for vehicle dynamics through the implementation of car-following and lane-changing models. Car-following refers to a vehicle’s acceleration and deceleration in relation to the positions and velocities of its neighboring vehicles. Lane-changing model describes the driver’s decision to move to a neighboring lane.
The Krauss model has been one of the most widely implemented model in microscopic simulators. The main limitations of the Krauss model are:
- Lane-change operations are assumed to take place in one time step.
- Car-following is assumed to be collision free.
MATISSE offers an improved version of the Krauss model:
- Lane change operations span several time steps.
- An estimation model is added to ensure “safe” lane change.
- Unexpected accidents can be simulated.
Route Planning
During the execution of the simulation, vehicle agents are given a destination to reach. They execute a non-trivial dynamic routing algorithm. At each simulation cycle, the vehicle agent checks if its current goal has to change (e.g., due to an emergency notification) and re-plans its travel route if necessary. The planned route represents the optimal route computed based on the traffic conditions at planning time. Following this step, the vehicle agent assesses its ability to execute its current plan based on current traffic conditions (e.g., does the lane occupied by the vehicle lead to the next road in the planned travel route? Is a lane change possible?). If the plan is not achievable, the vehicle agent deliberates and either defines an alternate travel route or executes an action (e.g., reduce speed).
Simulating Unexpected Accidents
The simulation of unexpected accidents is realized through the modification of the collision-free Krauss model and the definition of algorithms that take into account the driver’s perception in the driver’s decision making process.
In MATISSE, during the execution of the simulation, the user can modify the level of distraction of a driver. The higher the level of distraction, the less the driver is able to perceive its surroundings. The simulated drivers do not control the outcome of their actions. Rather, the environment decides the results of the drivers’ actions according to the environment’s physical laws. For example, in the case of a distracted driver who speeds up unexpectedly in a jammed traffic, the environment computes the outcome of this action (i.e., accident) based on the current traffic conditions and the environment’s physical laws. The result of this computation is not predefined, but determined based on the physical settings (position of the surrounding vehicles at collision time, speed, heading, mass). In addition, the environment updates the state of the colliding vehicles (e.g., to indicate their inability to move during the next simulation cycles).
This feature allows the user to dynamically introduce accidents and witness the emerging traffic behavior (e.g., traffic jams).
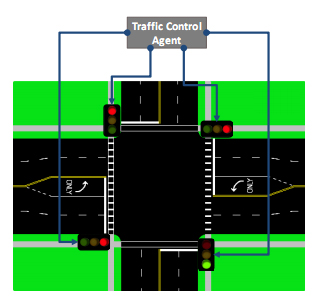
Intersection Controller Agent
The intersection controller manages the traffic flow at an intersection. It is makes use of simulated sensors to perceive its surroundings and communication mechanisms to exchange information messages with other agents The intersection controller deliberates over the acquired knowledge, generates regulation plans to control the traffic flow then dynamically changes its intersection displays.
An intersection controller implements the following intersection control strategies:
| Conventional | Agent-Based |
|---|---|
|
|
Simulated Communications
An intelligent traffic management system involves a large amount of interactions and collaborative decision-making among various agents. As such, supporting communication capabilities is fundamental to the implementation and validation of a simulated ITS. MATISSE provides mechanisms for the simulation of V2V, V2I and I2I communications.
A simulated vehicle agent can communicate with other vehicles and intersection controller agents located within its circle of influence. Similarly, an intersection controller agent can communicate with vehicle agents within its circle of influence.
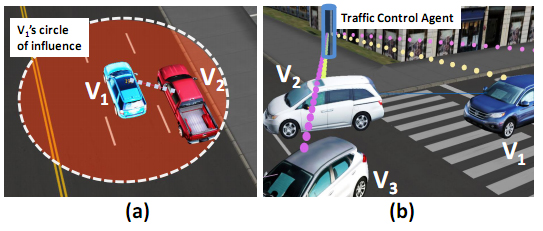
In addition, vehicle agents and intersection controller agents can communicate with their service managers to exchange information about the traffic environment.
Visualization of Traffic Simulations
MATISSE allows the concurrent 2D and 3D visualizations of traffic scenarios. Both 2D and 3D visualizers incorporate a built-in interface system that allows the user of the simulation to interact with the simulation at run-time to:
- Add vehicle agents to the simulation;
- Edit an agent property (e.g., change a vehicle agent maximum acceleration);
- Trigger an external event (e.g., siren); or
- Edit the proprieties of an environment object (e.g., add/remove a road barrier).
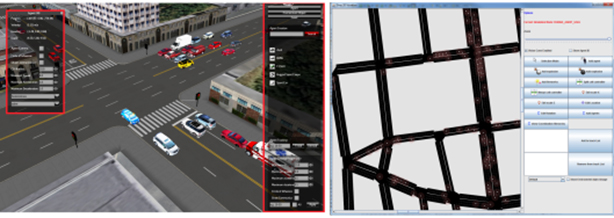
The figure above shows a snapshot of the 3D visualizer in MATISSE. The tool box on the right provides an interface for the user to add traffic agents or environment objects, and trigger external events. In addition, it allows the user to find and track a specific agent or group of agents. The dialog box on the left allows the user to change the properties of an individual traffic agent.
Related Publications
Behnam Torabi, Rym Z. Wenkstern, and Mohammad Al-Zinati. An Agent-Based Micro-Simulator for ITS. In Proceedings of the 21st IEEE International Conference on Intelligent Transportation Systems, IEEE ITSC 2018, page 2556–2561, Maui, Hawaii, USA, November 2018.
Behnam Torabi, Mohammad Al-Zinati, and Rym Z. Wenkstern. MATISSE 3.0: A Large-Scale Multi-agent Simulation System for Intelligent Transportation Systems. In Proceedings of the 16th International Conference on Practical Applications of Agents and Multi-Agent Systems, PAAMS 18, page 357–360, Toledo, Spain, June 2018.
Mohammad Al-Zinati and Rym Wenkstern. An agent-based self-organizing traffic environment for urban evacuations. In Proceedings of the The Sixteenth International Conference on Autonomous Agent and Multiagent Systems, AAMAS ‘2017, Sao Paulo, Brazil, May 2017.
Mohammad Al-Zinati and Rym Wenkstern. Simulation of traffic network re-organization operations. In Proceedings of the 20th IEEE/ACM International Symposium on Distributed Simulation and Real Time Applications, DS-RT 16, pages 178-186, London, UK, September 2016.
Mohammad Al-Zinati and Rym Wenkstern. Matisse 2.0: a large-scale multi-agent simulation system for agent-based its. In Proceedings of the 2015 IEEE?ACM International Conference on Intelligent Agent Technologies, lAT’ 15, pages 328-335, Singapore, Singapore, December 2015.
Mohammad Al-Zinati and Rym Wenkstern. A self-organizing virtual environment for agent-based simulations. In Proceedings of the 2015 international conference on autonomous agents and multiagent systems, AAMAS ’15, pages 1031-1039, Istanbul, Turkey, May 2015.
Z. Wenkstern, T. Steel, and G. Leask. A Self Organizing Architecture for Traffic Management, volume 6090 of Lecture Notes in Computer Science, Springer Verlag, 2010.
More publications available here
MATISSE 3.0
Architecture and Execution
Import Openstreetmap
Sensors
Driver Behaviours
Simulated V2X Communications
Real-time Simulation Parameters Modification