
The purpose of the DALI project is to address the following problem:
Given an existing centralized traffic management infrastructure, how can we turn it into a smart distributed infrastructure without the need for expensive changes or upgrades?
The DALI solution calls for enhancing existing traffic infrastructures by:
- Plugging-in smart software agents into existing intersection controllers
- Making use of Agent-to-Agent communications
- Implementing a distributed, adaptive, cooperative strategy
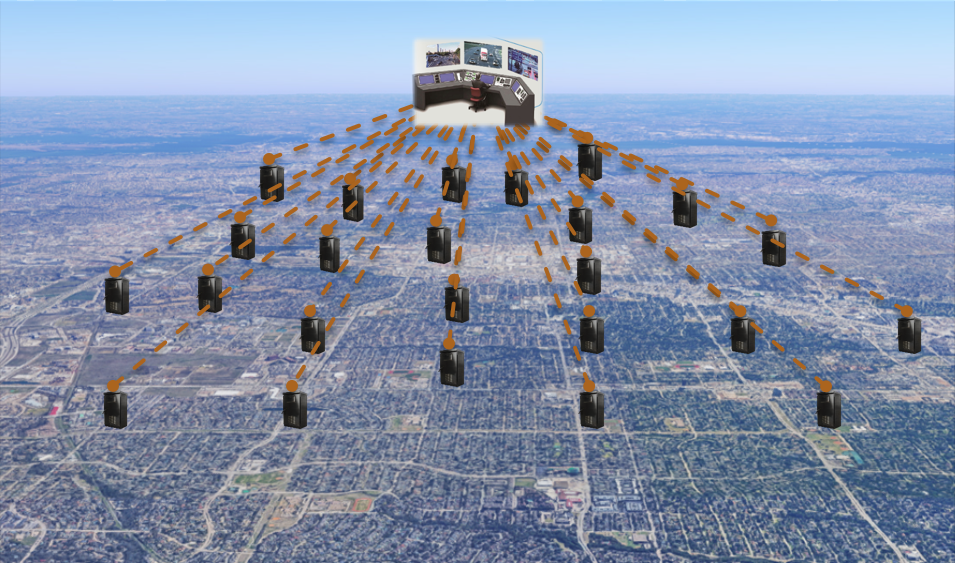
Centralized Traffic Management System

DALI
DALI (Distributed, Agent-based traffic LIghts), is a smart, collaborative traffic signal timing system. With DALI, intersection controller agents communicate with each other through direct links and do not have a supervising unit to oversee coordination.
DALI’s Agent
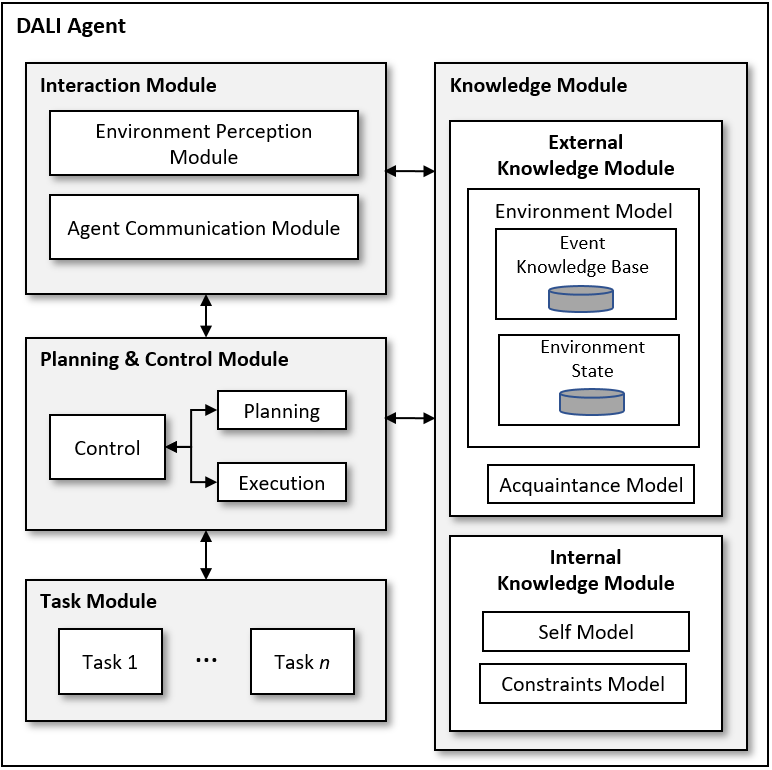
A DALI Agent architecture is given below. It consists of four modules:
The interaction module handles the agent’s interaction with external entities, separating environment interaction from agent interaction. The Environment Perception Module processes traffic sensor information. The Agent Communication Module implements agent-to-agent communication.
DALI’s Agent
The knowledge module is partitioned into External Knowledge Module (EKM) and Internal Knowledge Module (IKM). The EKM serves as the portion of the agent’s memory that is dedicated to maintaining knowledge about traffic data, and adjacent agents. The IKM serves as the portion of the agent’s memory that is dedicated to storing self-knowledge, including the agent’s current state, timing constraints, and behavioral limitations.
The task module manages the atomic tasks that the agent can perform.
The planning and control module serves as the brain of the agent. It uses information provided by the other modules to plan, initiate tasks, make decisions, and achieve goals.
DALI’s Operation
By default, agents execute a timing strategy that improves traffic flow. At the same time, they observe and analyze their respective intersections. If at any given time, an agent determines that its intersection is congested, it deliberates and defines a new timing plan. It also determines which direct intersections may be affected by the new timing plan and communicates with the concerned intersection agents. They, in turn, communicate with those agents that may be affected, and the process continues until all affected intersections are notified. The agents then negotiate and collaborate with one another to ensure that the traffic flow will be optimized throughout the intersections.
Simulation of the City of Richardson
DALI was validated by traffic engineers as well as through extensive simulation of various traffic network models including the City of Richardson’s traffic network. A model of the City’s road network including 1365 road segments, 128 signalized intersections and 965 non-signalized intersections was created in MATISSE.
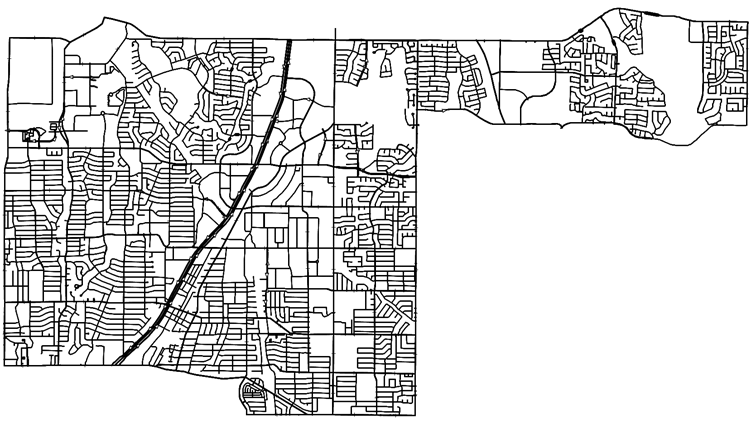
2D visualization of the City of Richardson’s Traffic Network.
Simulation of DALI using real world data
DALI: Hybrid Simulation
In addition to model-based simulations, hybrid simulations (i.e., integration of controllers in the field with the simulator) were run to verify compliance with the strict traffic regulations.
Hybrid Simulation
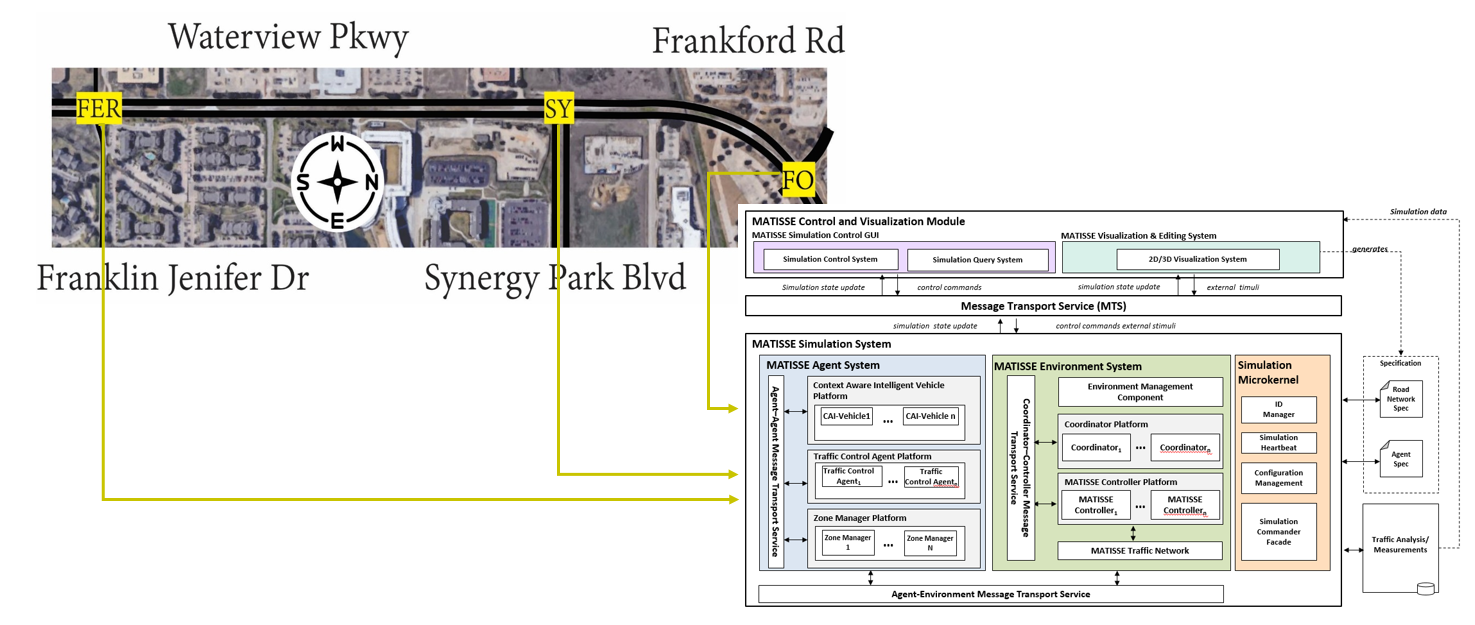
DALI was deployed in the City of Richardson’s Waterview Parkway corridor at three major intersections. The data collected over a period of three weeks shows that on average, DALI reduced delay by 40.12%. (43.56 percent during weekday peak hours).

DALI agents executing in the lab
Agent interface (right hand side) during execution.
Scenario illustrating agent execution on Frankford Rd and Waterview Pkwy.
Comparision of conventional system and DALI execution at Synergy Dr and Waterview Pkwy.
- Behnam Torabi, Rym Z. Wenkstern, and Robert Saylor. A Collaborative Agent-Based Traffic Signal System For Highly Dynamic Traffic Conditions. Journal of Autonomous Agents and Multi-Agent Systems (JAAMAS), to appear, 2019.
- Behnam Torabi, Rym Z. Wenkstern, and Robert Saylor. A Self-Adaptive Collaborative Multi-Agent based Traffic Signal Timing System. In Proceedings of the 4th IEEE International Smart Cities Conference, ISC2 2018, Kansas City, Missouri, USA, September 2018.
- Behnam Torabi, Rym Z. Wenkstern, and Robert Saylor. A Collaborative Agent-Based Traffic Signal System For Highly Dynamic Traffic Conditions. In Proceedings of the 21st IEEE International Conference on Intelligent Transportation Systems, IEEE ITSC 2018, Maui, Hawaii, USA, November 2018.
- Behnam Torabi, Rym Z. Wenkstern, and Robert Saylor. A Multi-Hop Agent-Based Traffic Signal Timing System for the City of Richardson. In Proceedings of the 16th International Conference on Autonomous Agent and Multiagent Systems, AAMAS 2018, page 2094–2096, Stockholm, Sweden, July 2018.
- Behnam Torabi, Rym Z. Wenkstern, and Robert Saylor. Agent-based decentralized traffic signal timing. In Proceedings of the 21st International Symposium on Distributed Simulation and Real Time Applications, DS-RT 17, page 123–126, Rome, Italy, October 2017.
- Mohammad Al-Zinati and Rym Wenkstern. Simulation of traffic network re-organization operations. In Proceedings of the 20th IEEE/ACM International Symposium on Distributed Simulation and Real Time Applications, DS-RT 16, pages 178-186, September 2016.
- Mohammad Al-Zinati and Rym Wenkstern. Matisse 2.0: a large-scale multi-agent simulation system for agent-based its. In Proceedings of the 2015 ieee/wiciacm international conference on intelligent agent technology, lAT’ 15, pages 328-335, December 2015.
- Mohammad Al-Zinati and Rym Wenkstern. A self-organizing virtual environment for agent-based simulations. In Proceedings of the 2015 international conference on autonomous agents and multiagent systems, AAMAS ’15, pages 1031-1039, May 2015.
More publications available here
Deployment of a Multi-Agent Traffic Signal Timing System (DALI) – AAMAS 2020
More dmoes are available here.
Deployment of DALI at intersection of Synergy Dr and Waterview Pkwy
Deployment of DALI at intersection of Frankford Rd and Waterview Pkwy
Before and After Deployment Comparision at intersection of Synergy Dr and Waterview Pkwy
DALI Agents Running in the Lab
Evaluation of DALI through simulation
 AAMAS 2020 Best Application Demo . The award recognizes the demo with the most impact in a real-world application.
AAMAS 2020 Best Application Demo . The award recognizes the demo with the most impact in a real-world application.
2019 Smart 50 Award, Mobility Category. The award recognizes the 50 most influential smart-city projects in the world, Smart Cities Connect Conference, Denver, CO, April 2019.
Finalist, Tech Titan Awards, Innovators Category. This award recognizes the elite in North Texas technology – individuals currently transforming the high-tech industry, Dallas, TX, August 2019.
Hometown Technology Hero, Proclamation, City of Richardson, September 2019.
Finalist, D CEO Magazine’s Innovation Awards, Transportation Category. This award honors CEOs, CIOs, CTOs, entrepreneurs, and other leaders driving innovation in North Texas.
 CBS 11 News segment, Richardson Introduces New, Smarter Traffic Lights, March 2019.
CBS 11 News segment, Richardson Introduces New, Smarter Traffic Lights, March 2019.
 Interview with the Dallas Business Journal, UT Dallas Professor Helps Invent Traffic Lights That Talk To Each Other And Reduce Congestion, August 2019.
Interview with the Dallas Business Journal, UT Dallas Professor Helps Invent Traffic Lights That Talk To Each Other And Reduce Congestion, August 2019.
Interview with Smart Cities Connect, University of Texas at Dallas and City of Richardson Team Up On Collaborative Traffic Signal Timing System, April 2019.
Article in Dallas Innovates, Go Time: Traffic-Control Signals Cut Stoplight Wait by 40% in Richardson, March 2019.
Article in Community Impact Newspaper, Multiyear Overhaul to Traffic Infrastructure System Underway in Richardson, April 2019.